
簡介
壓裝機(jī)是汽車變速箱生產(chǎn)線的主要生產(chǎn)設(shè)備,用于生產(chǎn)汽車變速箱的各種齒輪件及齒輪軸件,其壓裝力的大小決定了產(chǎn)品的質(zhì)量,過大或過小的壓裝力都會對產(chǎn)品造成一定的影響,嚴(yán)重時會把工件壓壞造成廢品或壓裝不完全,因此,嚴(yán)格控制壓裝力已成為壓裝機(jī)生產(chǎn)所必須解決的問題。常規(guī)壓裝機(jī)的壓裝力的調(diào)節(jié)依靠理論計算,手動調(diào)節(jié)液壓系統(tǒng)的壓力閥來實(shí)現(xiàn),其液壓原理圖,如圖1所示。
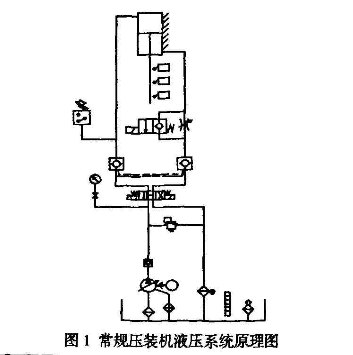
但是由于手動調(diào)節(jié)具有一定的誤差,且壓力表的顯示也存在一定的誤差,對于壓裝力要求的工件生產(chǎn),尤其是小噸位壓裝機(jī),該誤差已經(jīng)可能造成較大的影響。為了解決手動調(diào)節(jié)的誤差問題及頻繁手動調(diào)節(jié)的繁瑣問題,針對某單位的40噸壓裝機(jī)設(shè)計了電液比例控制液壓系統(tǒng)。
電液比例控制壓裝機(jī)
根據(jù)常規(guī)壓裝機(jī)的壓力調(diào)節(jié)問題,對其液壓系統(tǒng)進(jìn)行了改造,改造后的液壓系統(tǒng),如圖2所示。
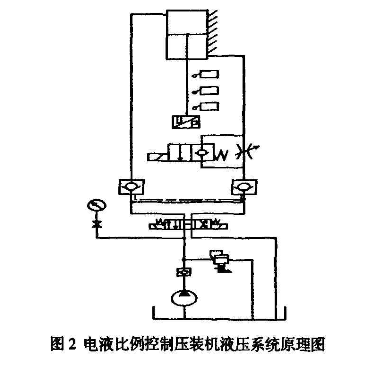
其閉環(huán)控制系統(tǒng)框圖,如圖3所示。本系統(tǒng)的液壓泵采用恒壓變量柱塞泵;溢流閥采用先導(dǎo)式電液比例溢流閥;在液壓缸與工件之間增加了力傳感器,作為電液控制系統(tǒng)的反饋元件。與傳統(tǒng)的手動調(diào)節(jié)和普通開關(guān)型液壓閥相比,電液比例控制閥能大大提高液壓系統(tǒng)的控制精度,并且可以彌補(bǔ)普通液壓控制閥只能進(jìn)行開關(guān)控制、不能進(jìn)行連續(xù)控制的缺陷。
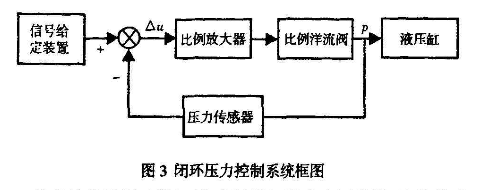
該系統(tǒng)的控制過程如下:由計算機(jī)輸出電壓信號,該信號通過比例放大器轉(zhuǎn)變?yōu)殡娏餍盘枺ㄟ^改變比例溢流閥開口調(diào)節(jié)油缸無桿腔的壓力從而改變壓頭輸出力的大小,通過力傳感器實(shí)時檢測壓頭輸出力并輪換為電壓信號通過采集卡傳給計算機(jī),該實(shí)測值與程序中設(shè)定值進(jìn)行比較,經(jīng)過控制算法運(yùn)算輸出新的控制信號實(shí)現(xiàn)力的閉環(huán)控制。由電磁換向閥控制油路方向?qū)崿F(xiàn)壓下力輸出控制和壓頭縮回。在系統(tǒng)中計算機(jī)參與實(shí)現(xiàn)了對數(shù)據(jù)采集、控制決策及控制輸出三個基本功能。
系統(tǒng)數(shù)學(xué)模型的建立
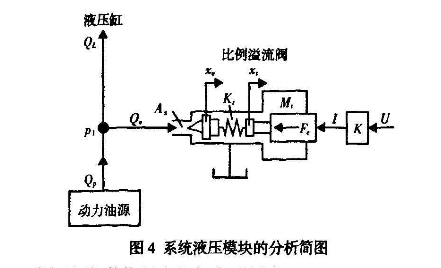
如圖4所示,為系統(tǒng)液壓模塊的分析簡圖。據(jù)此可列出壓裝機(jī)的壓下力的動態(tài)方程:
 (1)
(1)
式中:Fg——作用在工件上的奪下力;
A2——油缸活塞有桿腔的面積;
p2——系統(tǒng)的背壓(即壓下油缸有桿腔的壓力);
M——活塞桿、力傳感器和壓頭的質(zhì)量;
B——活塞及負(fù)載的粘性阻尼系數(shù);
K——負(fù)載彈簧剛度。
假設(shè)忽略活塞及負(fù)載的粘性阻尼,則式(1)中活塞及負(fù)載的粘性阻尼系數(shù)B=0。
式(1)經(jīng)拉普拉斯變換之后,改寫為:
![]() (2)
(2)
模糊PID控制器設(shè)計
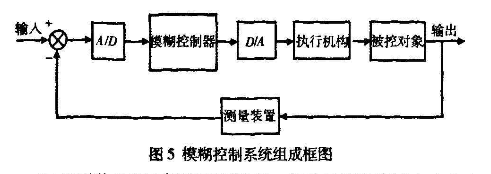
壓裝機(jī)模糊控制系統(tǒng)的組成具有傳統(tǒng)計算機(jī)控制系統(tǒng)的結(jié)構(gòu)形式,主要由模糊控制器、輸入輸出接口、執(zhí)行機(jī)構(gòu)、被控對象和測量裝置組成,其控制系統(tǒng)組成框圖,如圖5所示。
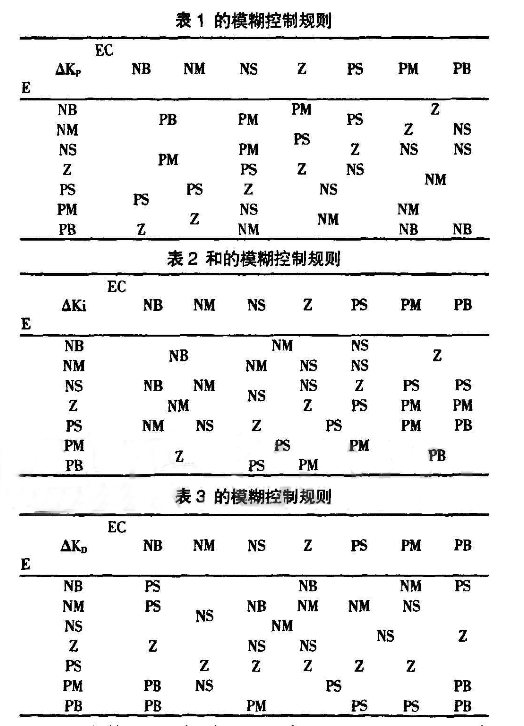
對于壓裝機(jī)壓力模糊控制系統(tǒng),先確定輸出變量ΔKP、ΔKI、和ΔKD與偏差E和偏差變化率EC之間的模糊關(guān)系,在運(yùn)行中通過不斷檢測E和EC,再根據(jù)模糊控制原理對參數(shù)進(jìn)行在線修改并滿足在不同和時對控制參數(shù)的不同要求,使被控對象具有良好的動、靜態(tài)性能。如表1~3所示,分別為ΔKP、ΔKI、和ΔKD的模糊控制規(guī)則。
給系統(tǒng)輸入一個階躍信號,則采用MATLAB/SIMULINK計算機(jī)仿真工具對其模糊PID控制的壓裝機(jī)壓力控制系統(tǒng)仿真曲線,如圖6所示。
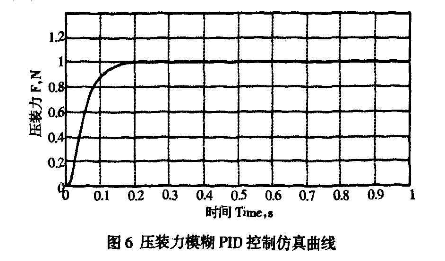
由圖6可見,該系統(tǒng)無穩(wěn)定誤差和超調(diào),壓裝力峰值時間0.17s,上升時間0.12s,調(diào)整時間0.14s,滿足控制系統(tǒng)的技術(shù)要求及現(xiàn)場生產(chǎn)的實(shí)際需求,具有較好的控制效果。
結(jié)論
采用電液比例控制系統(tǒng)和模糊PID控制器對壓裝機(jī)壓裝力進(jìn)行控制,可以較好地實(shí)現(xiàn)壓裝力的精準(zhǔn)控制,以實(shí)現(xiàn)現(xiàn)場生產(chǎn)對壓裝力的精度要求控制,并可以方便地通過計算機(jī)對壓裝力進(jìn)行修改,進(jìn)而可以采用一臺設(shè)備實(shí)現(xiàn)多臺設(shè)備的功能,實(shí)現(xiàn)現(xiàn)場產(chǎn)品生產(chǎn)的多樣化和經(jīng)濟(jì)化。




